


项目介绍:
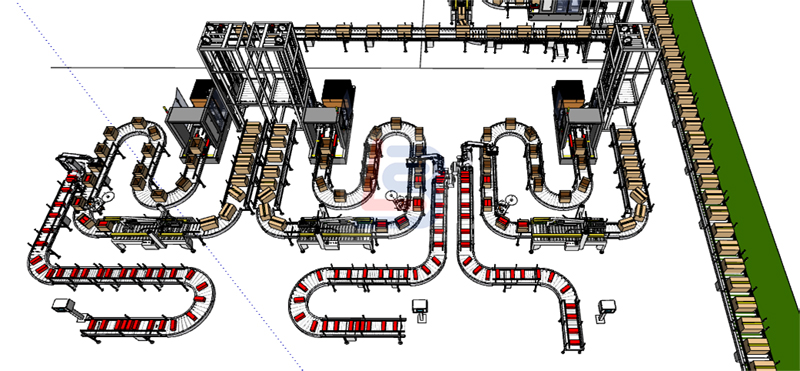
packing系统设计图(一期2条packing、二期3条packing)
自动缠膜机+磁导航系统AGV+自动拆盘机
立体仓库系统(WMS+WCS)
机器人码垛位满盘成品,由磁导航背驮式AGV运输至满盘入库口,经过自动缠膜机缠 膜后,提升机将满盘提升至FL3200mm高空输送机输送至立体仓库系统;
拆盘机位空托盘通过AGV自动补充到码垛机位;
一期成品入库流程:机器人码垛完,通过AGV将成品托盘输送至自动缠膜机,缠膜完成后通过入库端输送机将成品存放于立体仓库系统中;
一期空托盘供应流程:立体仓库系统将托盘自动输送至出库口,通过AGV将空托盘输送至机器人码垛位,等待成品码垛;
 客服1
客服1